The combination of iFeel wearable devices combined with the power of iFeel algorithms gave birth to a stunning new technology: whole-body wearable technology, for real-time fatigue analysis to prevent human musculoskeletal diseases by enhancing ergonomic user experience.
Think of a suit equipped with iFeel wearable devices, sensorized shoes and flexible. The output is transferred to the iFeel AI algorithm, which is able to:
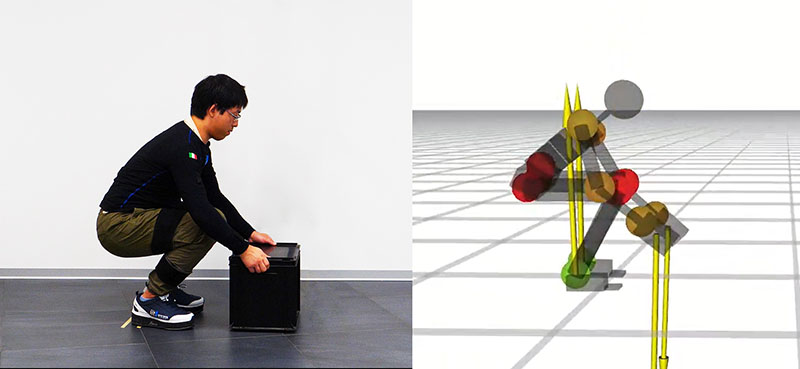
- track human motions
- analyse the fatigue in the back-end
- provide the user with feedback through the interface
Inertial Sensors
Our iFeel technology is composed of different elements.
The inertial sensors are empowered with AI algorithms for human whole-body biomechanical estimation, and they collect motion tracking and kinematic data.
They are tiny, and we can easily insert them into our wearable devices.


Wireless suit
Our full-body wireless suit is equipped with biometric and motion sensors and a set of actuators for haptic feedback.
It features a total of 10 inertial sensors, 6 in the upper body and 4 in the lower body. We are working on adapting this system to work with clothing.
Shoes
The shoes are sensorized, acting as portable force platforms. It features a node and two force/torque sensors per shoe.
The ultra-thin sensorized insole collects pressure distribution data.


Haptic
Inside the human wearables devices there are a set of haptic trasducers integrated. They provide a haptic feedback to allow the user to feel the touch on the skin.

